 Aktuální číslo časopisu Ekonom
Aktuální číslo časopisu Ekonom
U severního pobřeží Španělska ve vodách Biskajského zálivu se v současné době pohybuje pětice robotů, kteří připomínají přerostlé kapry. Jsou však podstatně dražší než rybky vánoční. Jeden exemplář, měřící půldruhého metru, přijde na 21 tisíc eur.
Roboti sledují znečištění mořské vody. Fungují autonomně bez dálkového ovládání a energii získávají z baterií.
Obdobného robota, tentokrát určeného pro sebevražedné odminovací mise, zhotovili jihoafričtí technici. Jejich metrová, ploutvemi hnaná a dálkově řízená ponorka nese přibližně sedm kilo trhaviny. Po nalezení námořní miny se k ní přiblíží a odpálením nálože zničí ji i sebe.
Ve vodě i na vzduchu
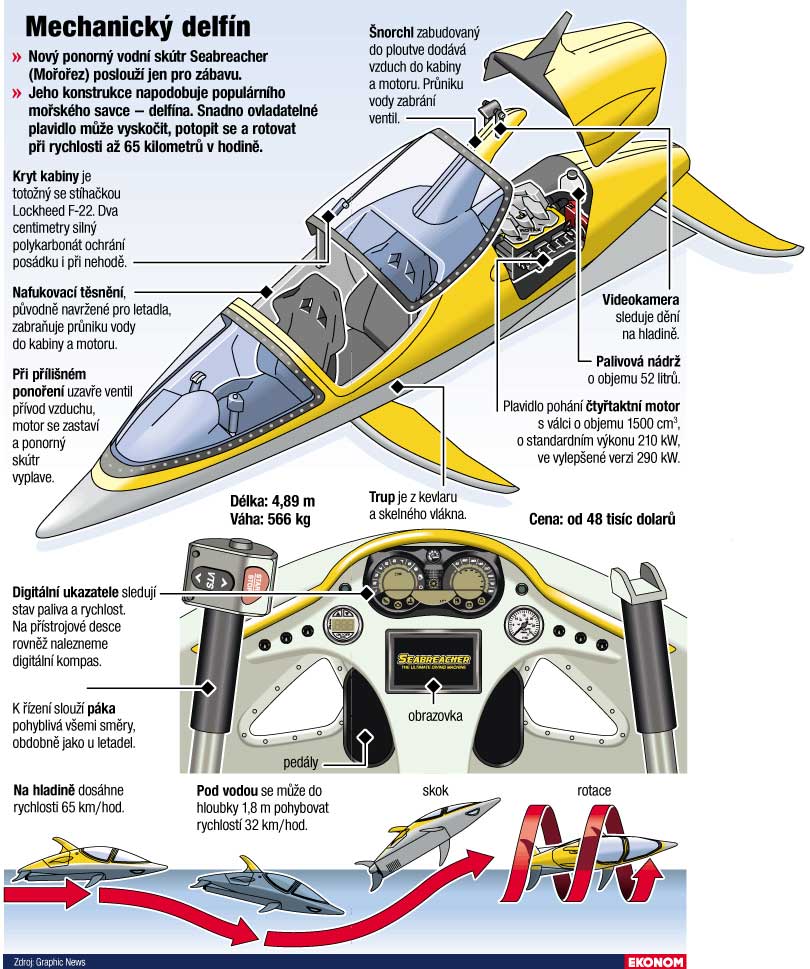
Nejobratnějším lidmi zhotoveným současným plavidlem bude nejspíše Seabreacher (Mořořez), který umí vyskočit z vody a zvládne i krátkodobý ponor (viz Mechanický delfín). Zhotovila ho dvojice amatérských konstruktérů Rob Innes z Nového Zélandu a Dany Piazza z Kalifornie.
Svým tvarem a chováním připomíná nikoliv náhodou delfína. Pohání ho tryskající proud vody obdobně jako vodní skútry. Ploutve a silný motor mu umožňují ponořit se pod vodu.
Současný na trhu dostupný model vychází ze starších obdobných konstrukcí. Vzduch pro posádku a spalovací motor dodává šnorchl, který většinou vyčnívá ven z vody. Je vybaven ventilem, který se v případě ponoření uzavře a zabrání zatopení válců. Během patnácti sekund dojde motoru vzduch, zastaví se a stroj vyplave. Pro případ nouze nese na palubě lahev se stlačeným vzduchem a hasicí přístroj.
I když je Seabreacher nepochybně zajímavý a zábavný stroj, nejedná se o první zařízení schopné pohybu v obou prostředích. Předstihla ho vojenská torpéda, například ruská samonaváděcí střela Granit, označená SS-N-19.
Vypouští se z lodi nejprve jako raketa, která letí těsně nad mořskou hladinou nadzvukovou rychlostí po dobu přibližně jedné minuty. Radarem je prakticky nezjistitelná. Těsně před cílem se ponoří pod vodu a pokračuje rychlostí okolo 125 km za hodinu, což je zhruba dvojnásobek rychlosti v současnosti používaných torpéd.
Není vyloučeno, že právě toto torpédo v roce 2000 omylem potopilo ruskou ponorku Kursk při manévrech v Barentsově moři.
Ponorky s ploutvemi
Manévrování pomocí ploutví ještě neznamená, že lidé zvládnou dokonale napodobit pohyb ryb či vodních savců, které žene vpřed vlnivý pohyb celého těla završený úderem ocasní ploutve.
Na americkém Massachusetts Institute of Technology vyvíjejí umělou ploutev z vodivých polymerů, která mění svůj tvar v závislosti na tom, jak jí prochází elektrický proud.
V budoucnu by měla řídit ponorky, protože oploutvení tvorové se ve vodě dokážou pohybovat mnohem obratněji než jakékoli plavidlo pomocí kormidel a šroubů včetně těch usazených kvůli manévrování kolmo k ose lodi.
Lidské technologie využívají na rozdíl od přírody, jež upřednostňuje plynulý pohybu svalů sem a tam, spíše rotaci. U živých tvorů lze najít rotační pohon jen na buněčné úrovni. Bičíky některých jednobuněčných organismů roztáčí drobný bílkovinný elektromotor hnaný nepatrným elektrickým napětím.
Detailně byl dosud prozkoumán u bakterie treponema primitia, protože je podstatně větší než u jiných jednobuněčných druhů. Je na něm rozpoznatelná obdoba statoru a rotoru, nikoliv však z měděného vinutí, nýbrž z 25 různých bílkovin.
Rybí orgány jako zdroj inspirace
Ploutve nejsou jediným zdrojem inspirace konstruktérů. Úžasným evolučním vynálezem je i rybí měchýř, s jehož pomocí se ryba může volně vznášet ve vodě a nehýbat se. Někteří biologové se dokonce domnívají, že právě samonafukovací plovací měchýř umožnil rozvoj ryb do obrovského počtu druhů. U mnoha z nich slouží k jeho plnění zvláštní síť cév, která se objevila asi před sto miliony let, i speciální typy krevních barviv.
I měchýř dokázal konstruktéry inspirovat. V nejbližší době dorazí ke břehům Španělska po pět tisíc kilometrů dlouhé plavbě vědecký ponorný kluzák Scarlet Knight (Šarlatový rytíř), který je ve skutečnosti žlutý. Jméno nese na počest atletického týmu americké Rutgersovy univerzity, která první transatlantickou plavbu robotického plavidla bez posádky organizuje. Svou pouť zahájilo na opačné straně Atlantiku 27. dubna letošního roku.
Miniponorka se pohybuje na principu kluzáku hnaného změnami vztlaku pomocí zařízení, které připomíná rybí měchýř.
Malými otvůrky na přídi nasává elektromotorem poháněné čerpadlo vodu. Protože hmotnost plavidla roste, začne se potápět. Na bocích umístěná křidélka zajistí, že se zároveň začne pohybovat vpřed. Po dosažení předem nastavené hloubky se voda vyčerpá a kluzák se začne zvolna stoupat k hladině. Celou plavbu stoupá a klesá rychlostí přibližně jednoho kilometru za hodinu, ale pro monitorování okolí je takový pomalý pohyb dostačující, ne-li žádoucí.
První robotická ponorka zkoumala v roce 2004 Golfský proud a přinesla mnoho zajímavých údajů. Od té doby se podvodní kluzáky staly cennými nástroji průzkumu světového oceánu. Mohou dosáhnout hloubky až čtyři tisíce metrů.
Právě nyní s jejich pomocí probíhá intenzivní výzkum oblastí u severovýchodního pobřeží Spojených států, kde v oceánu sezonně vznikají rozsáhlé oblasti se sníženým obsahem kyslíku, což velice poškozuje lov krabů.
Za napodobení stojí i jeden ze smyslových orgánů ryb a ve vodě žijících obojživelníků - postranní čára. Tvoří ji smyslové buňky s výrůstky uložené v kanálcích vyplněných slizem, jež ústí na povrchu těla. Okolní proudící voda na něj zatlačí, a tím zdeformuje výrůstek buňky, čímž vznikne nervový vzruch.
Postranní čáry umožňují rybám rozpoznat kořist, nepřítele i obyčejnou překážku v úplné tmě nebo v kalné vodě.
Americké námořnictvo iniciovalo výzkum obdobného zařízení vytvořeného standardními litografickými technikami a leptáním, obdobně jako většina mikroelektronických součástek. Senzor o velikosti asi čtvrt čtverečního milimetru reaguje i na nepatrné pohyby vody v okolí, které způsobí vzájemnou změnu polohy magnetických materiálů.
Taková čidla umístěná na povrchu ponorek umožní sledovat jejich bezprostřední okolí, což doposud není možné.
Ondřej Dvořák
spolupracovník redakce
Lidské technologie využívají na rozdíl od přírody, jež upřednostňuje plynulý pohyb svalů sem a tam, spíše rotaci.
4000 metrů
Až do takové hloubky se dokáže ponořit miniponorka založená na principu rybího měchýře.
Oploutvení tvorové se ve vodě dokážou pohybovat mnohem obratněji než jakékoli plavidlo pomocí kormidel a šroubů.
Zaujal vás článek? Pošlete odkaz svým přátelům!
Tento článek je odemčený. Na tomto místě můžete odemykat zamčené články přátelům, když si pořídíte předplatné.
Newsletter týdeníku Ekonom.
Odhlásit se můžete kdykoliv.
Přihlášením k newsletteru beru na vědomí, že dochází ke sbírání a zpracování osobních údajů. Více informací o zásadách ochrany osobních údajů naleznete ZDE.





{kind=link}